
近日,機(jī)電學(xué)院苑進(jìn)教授團(tuán)隊(duì)在《Computers and Electronics in Agriculture》,發(fā)表題為“Design and interaction dynamics analysis of a novel hybrid bending-twisting-pulling end-effector for robotic tomato picking”的最新研究成果。博士研究生方家明為論文第一作者,機(jī)電學(xué)院苑進(jìn)教授和劉雪美教授為共同通訊作者,辛振波副教授、戴念祖博士生參與課題研究,我校為唯一通訊單位。
番茄是全球消費(fèi)最多的蔬菜之一,近年全球種植面積約為500萬公頃,產(chǎn)量已達(dá)1.77億噸。然而,鮮食番茄收獲仍以人工采摘為主,隨著人工成本高企,且季節(jié)性工人難以獲得。這直接影響了番茄價(jià)格和生產(chǎn)效益,全球范圍內(nèi)研發(fā)番茄采摘機(jī)器人變得愈發(fā)緊迫。
由于絕大多數(shù)番茄果實(shí)成熟度不一致,且番茄聚集生長(zhǎng)且相互遮擋,開發(fā)番茄機(jī)器人簇生果實(shí)單果采摘技術(shù)非常重要。現(xiàn)有采摘末端執(zhí)行器大多依賴于對(duì)果實(shí)穩(wěn)定夾持,然而,簇生番茄使得末端執(zhí)行器難以穩(wěn)定地固定果實(shí)。而且,在采摘過程中,末端執(zhí)行器可能會(huì)與鄰近番茄發(fā)生碰撞,導(dǎo)致采摘失敗或果實(shí)損傷。最后,現(xiàn)有的大多數(shù)末端執(zhí)行器只能對(duì)番茄及果莖施加單一類型的力(拉力或扭轉(zhuǎn)力)。這可能會(huì)損傷植株,降低采摘效率,并使采摘過程對(duì)番茄姿態(tài)高度敏感。針對(duì)以上技術(shù)難題,山東農(nóng)業(yè)大學(xué)苑進(jìn)教授團(tuán)隊(duì)提出了一種彎折-扭轉(zhuǎn)-拉伸混合的番茄機(jī)器人采摘方法,并設(shè)計(jì)了新型末端執(zhí)行器,用于簇生番茄果實(shí)的單果采摘,以提高采摘效率并減少果實(shí)損傷。
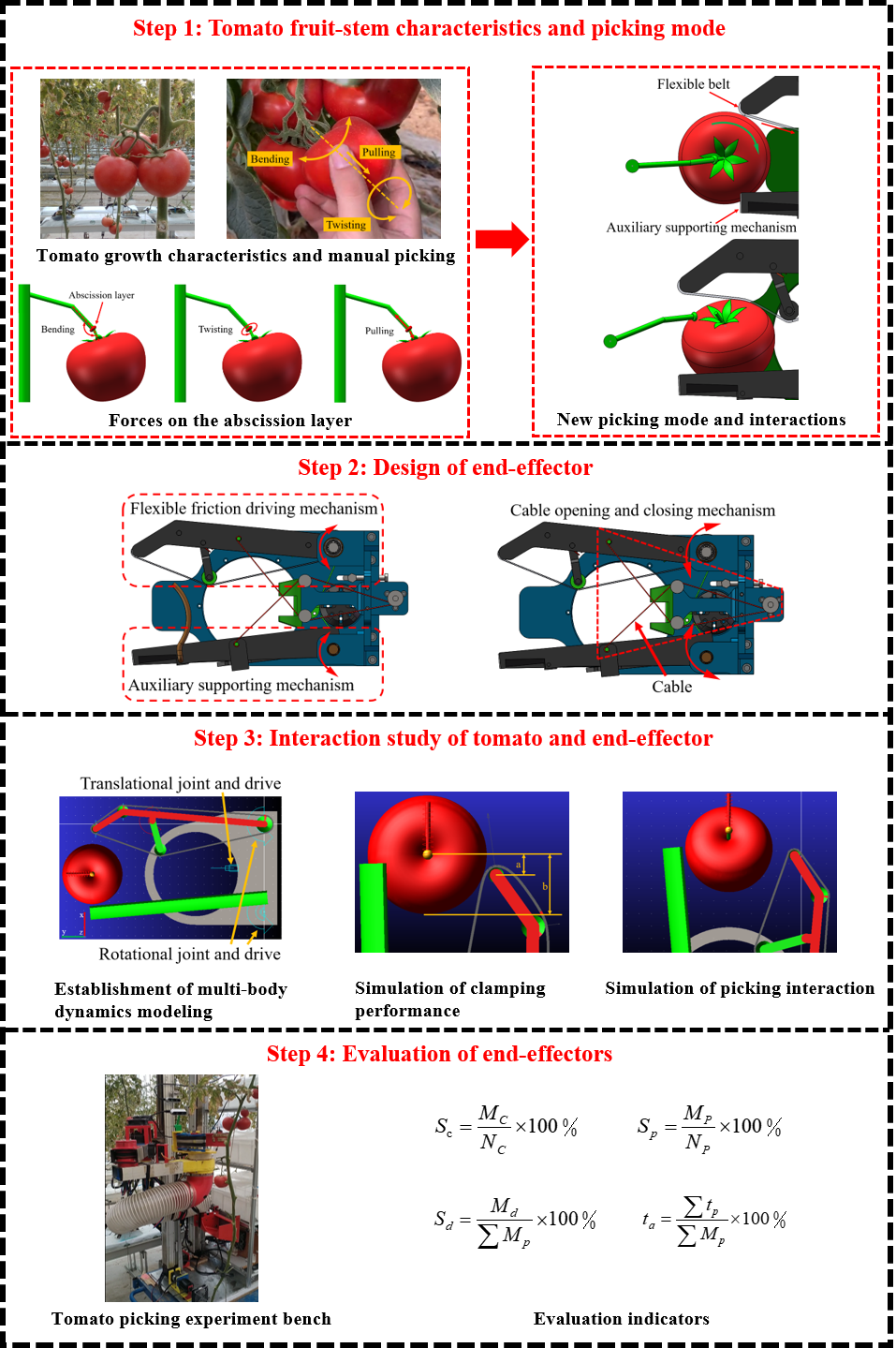
圖1. 整體工作流程
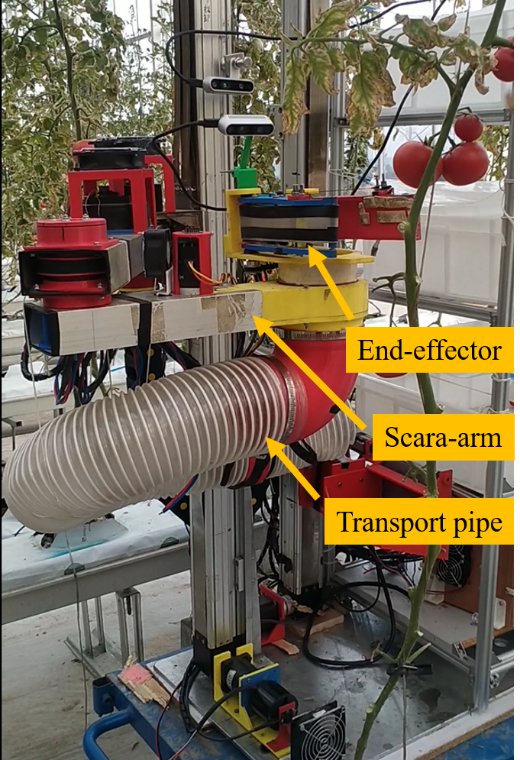
圖2. 番茄采摘機(jī)器人試驗(yàn)平臺(tái)
論文首先分析了人工采摘的力學(xué)特征,提出了仿生人手操作力的番茄機(jī)器人采摘模式。然后,設(shè)計(jì)了一種緊湊型剛?cè)峄旌夏┒藞?zhí)行器,利用順應(yīng)性變形帶進(jìn)行包裹夾持,能夠?qū)5姆蛛x層施加彎曲-扭轉(zhuǎn)-拉伸的混合力,以分離果實(shí)。然后,建立了包括果梗、番茄和末端執(zhí)行器的多體動(dòng)力學(xué)模型,以分析采摘過程中的交互動(dòng)力學(xué)。最后,提出了評(píng)估末端執(zhí)行器采摘效率的指標(biāo)。仿真結(jié)果表明,只夾住番茄表面的1/3仍能將目標(biāo)番茄從番茄簇中卷入末端執(zhí)行器。通過在分離層施加混合力,成功采摘各種姿態(tài)的番茄,彎曲扭矩峰值為71.6-262.68 N·mm,扭轉(zhuǎn)扭矩峰值為18.46-32.36 N·mm,拉力峰值為25.18-31.64 N。田間試驗(yàn)表明,番茄的夾持成功率為93.3%,四種不同姿態(tài)番茄的采摘成功率分別為93.3%(豎直)、90.0%(正前)、76.7%(左前)和83.3%(右前)。當(dāng)柔性帶以282.7 mm/s的速度運(yùn)行時(shí),末端執(zhí)行器的平均單次采摘時(shí)間為1.8 s,果實(shí)損傷率為1.9%。該研究表明該末端執(zhí)行器在應(yīng)對(duì)番茄的聚集生長(zhǎng)特性和采摘要求方面的有效性和可行性,有望加快簇生番茄的單果高效、低損采摘機(jī)器人的技術(shù)研發(fā)進(jìn)程。
該研究得到了國(guó)家自然科學(xué)基金、山東省重大科技創(chuàng)新工程項(xiàng)目和山東省現(xiàn)代農(nóng)業(yè)產(chǎn)業(yè)技術(shù)體系的資助。
論文鏈接:https://doi.org/10.1016/j.compag.2025.110011
編 輯:萬 千
審 核:賈 波

