

機械與電子工程學院劉平團隊在《Computers and Electronics in Agriculture》在線發表了題為《A bionic adaptive end-effector with rope-driven fingers for pear fruit harvesting》,研究生李明為該論文的第一作者,劉平教授為該論文的通訊作者。
隨著農業機器人技術的發展,越來越多的水果收獲機器人被應用到實際的生產中來。在水果收獲機器人的研制過程中,采摘末端執行器是最為關鍵的一環,直接影響采摘收獲的作業效率。該研究以梨果收獲為例,提出了一種仿生自適應繩驅梨果采摘末端執行器,以提高梨果收獲機器人的采摘作業效率,降低梨果的損傷率。
針對自然環境中梨果表皮脆弱,采摘過程中易受損傷問題,該研究仿生人手進行了末端執行器的建模與研制。該末端執行器仿照人手結構,采用繩驅的方式驅動手指完成抓握動作;末端執行器指節內側貼裝有自研夾持力傳感器,可實時監測和控制手指包絡抓取的夾持力,防止對梨果造成損傷;此外,該末端執行器的指節上還貼裝有自研姿態傳感器,以實時監測各手指的姿態與位置,使之運行在安全的工作空間和工作狀態下,進一步提高抓取的效率;最終該末端執行器可安裝在梨果收獲機器人不同型號機械臂的末端,實現靈活作業。
該研究構建了梨果收獲采摘平臺,并進行了模擬采摘試驗。試驗結果表明,該研究提出的仿生自適應繩驅梨果采摘末端執行器對不同品種、形狀和大小的梨果具有自適應抓取能力,抓取過程穩定,抓取動作響應速度快,可實現無損傷抓取,對促進梨果收獲自動化與智能化有重要意義,為后續水果采摘末端執行器的研究提供了學術和工程參考。

圖1 人手抓取采摘動作參考
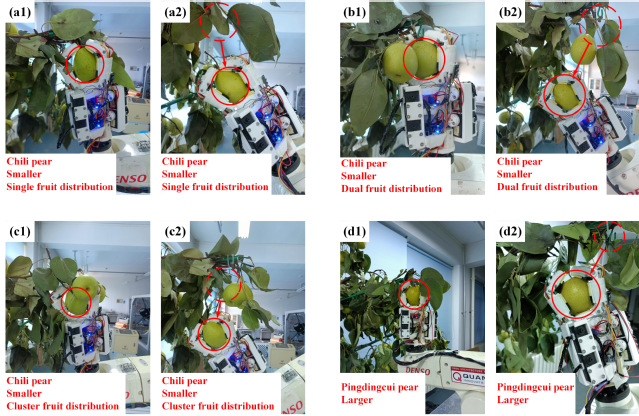
圖2 實驗室模擬抓取采摘試驗
論文鏈接:https://doi.org/10.1016/j.compag.2023.107952
編 輯:萬 千
審 核:賈 波





